
シールはこんな感じ。
ケロロでも触れましたが、厚みがあって粘着力に不安のあるタイプのシールなので、曲面に貼ると角から自然に剥がれてしまいます。
タママは特に厳しい。




タママ。
目のシールは凛々しい感じの物が付属。
口のシールは放っておくと端から剥がれてきてしまいます。
尻尾は左右に動かせます。


ソーサーに搭乗。




タママロボMk-II。
ケロロロボよりも配色は複雑ではないので、素組みでの仕上がりは良し。
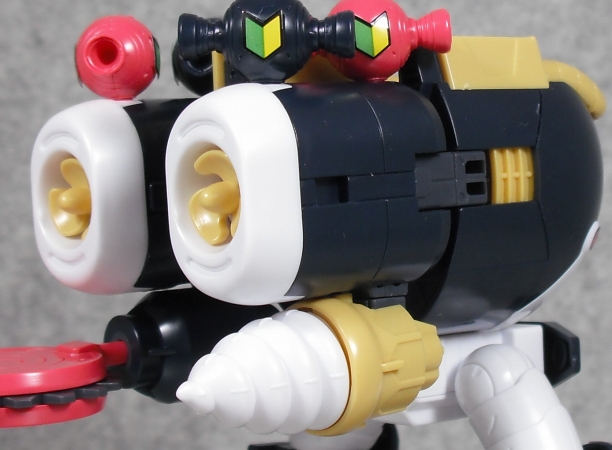
問題なのはシールで、肩のアメ玉魚雷のマーク(4個×2枚)、膝、脛とどんどん剥がれます。
鬱陶しいので全て裏に瞬間接着剤を塗って固定させました(上の写真は固定前)。

ケロロロボと。

腰部が軸接続。


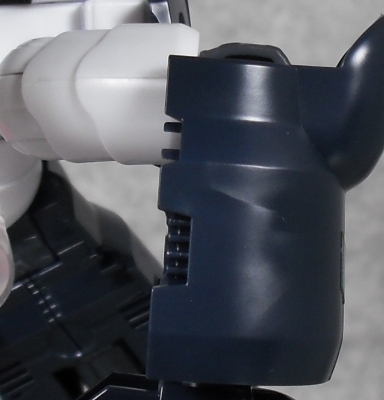
肩は根元が後方スイング+軸接続+外側スイング。
普通のロボットにあるような腕を上に上げる為の関節が存在しません。
ただ2枚目の写真のような動かし方をすれば、腕を上げた感じの位置に持ってくることは可能。
肘は軸接続+スイング。
いちおう上腕のような部分を引き出せるようになってますが、曲がり幅は変わりません。
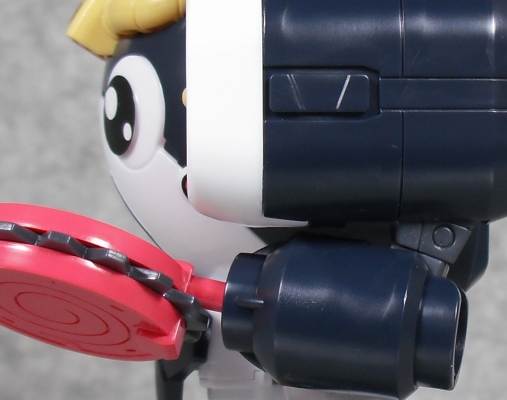
右腕のドリル(アイスクリームのクリーム)は軸回転。
左腕の丸ノコはボールジョイント接続、刃が回転。



股関節は根元が上下スイング+軸接続+上下スイング、腿が軸回転。
開脚に腿上げと余裕で動かせます。
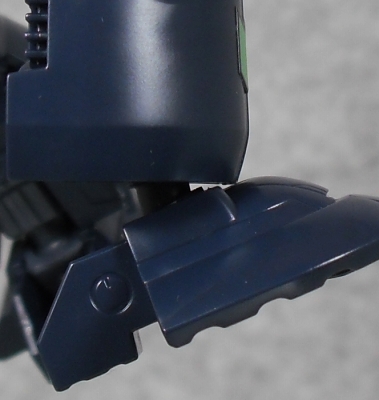
膝は軸接続+スイング。
足首は前後スイング+ボールジョイント接続。

立て膝も可能。


ソーサーをドッキング。
固体差かデザインの違いか、ケロロよりもソーサーが外れやすい。

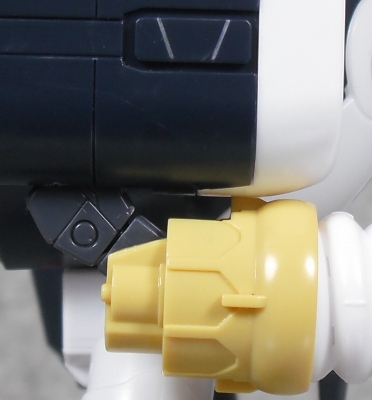
肩のアメ玉魚雷は軸接続なので全て外せます。
変形手順。
肩を後方へ畳み、肘を曲げる。
左腕の丸ノコは90度回転。
股関節から後方へ曲げ、膝の角度を調節して足を伸ばす。
フロントアーマーを下げて変形終了。


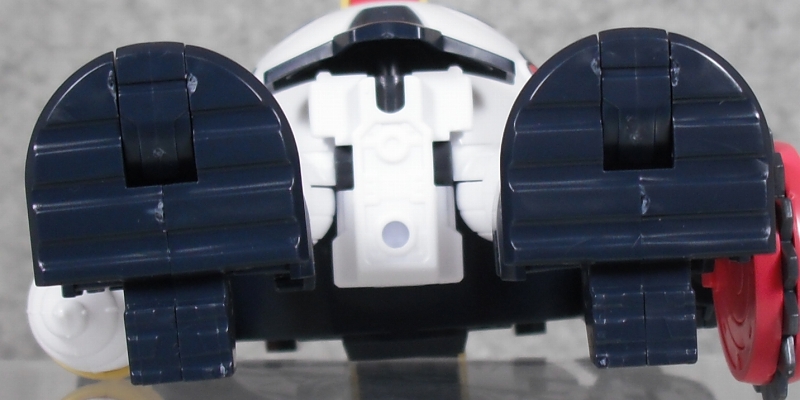
サブマリンモード 巡航モード。
キレイにまとまってますね。
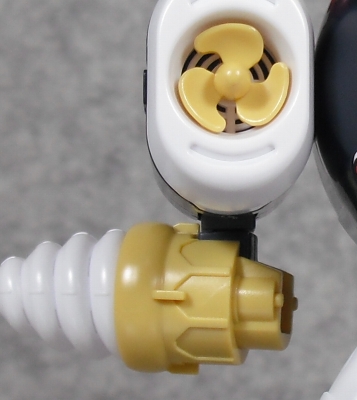
肩のスクリューがここでデザイン的に意味を成します。
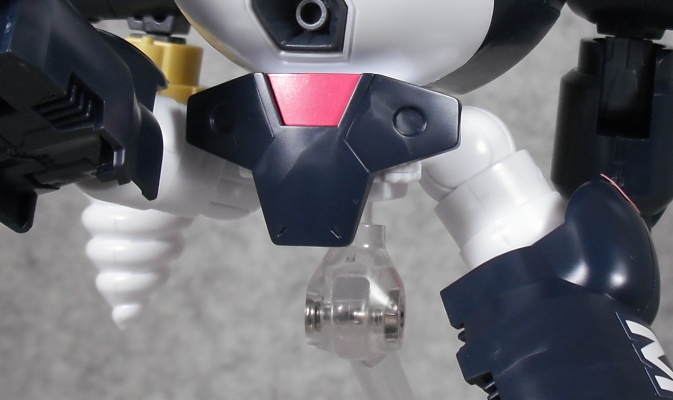
股にスタンド接続穴があるので、付属の台座で浮かせられます。

アーム(脚)を伸ばして爪を開いて、探査モードへ。



