
フレームアームズから「グライフェン」のレビューです。
『フレームアームズシリーズ』に登場するフレームアームズ。
人類側の運用する機体。
本来は海底作業用の機体であり高い耐圧機能を持つ。
更に腕部と脚部に搭載したサブアームにより
従来のFAよりも多くの武装を搭載することで砲撃戦に対応するほか
敵FAを握り潰すといった格闘戦を行うことも可能。
ではレビューは下からどうぞ。


パケ横。
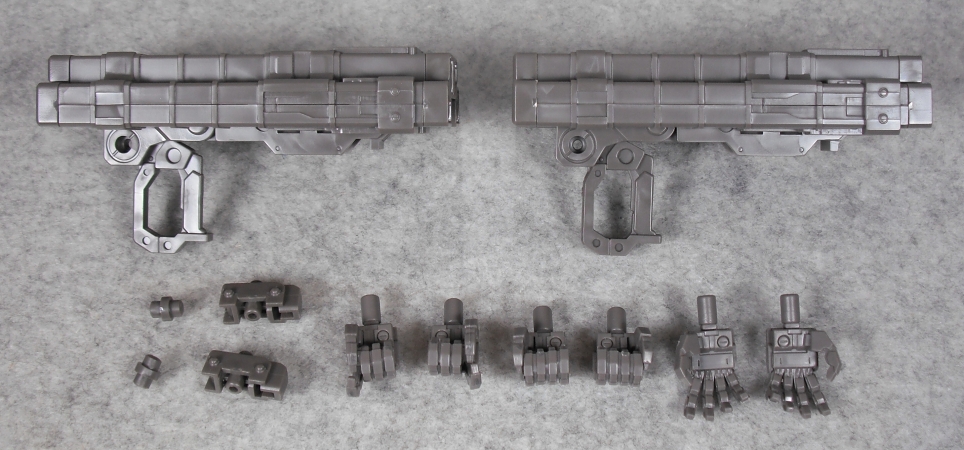
付属品一覧。
・マルチパーパスランチャー×2
・ランチャー用マウントパーツA×2
・ランチャー用マウントパーツB×2
・持ち手A(左右各1)
・持ち手B(左右各1)
・平手(左右各1)
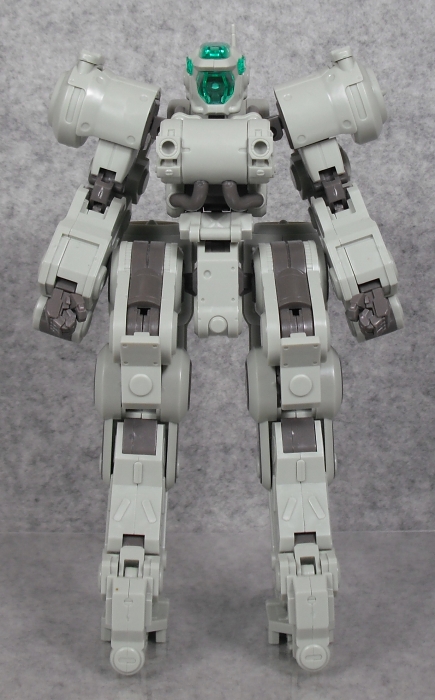
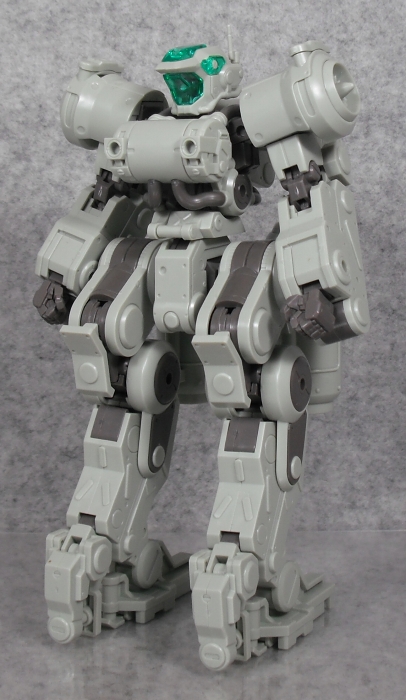
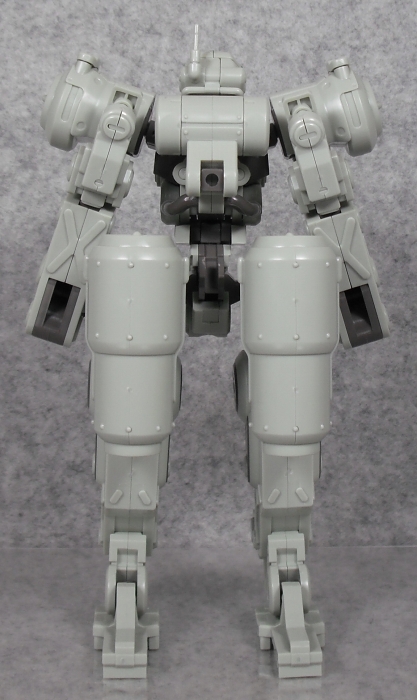

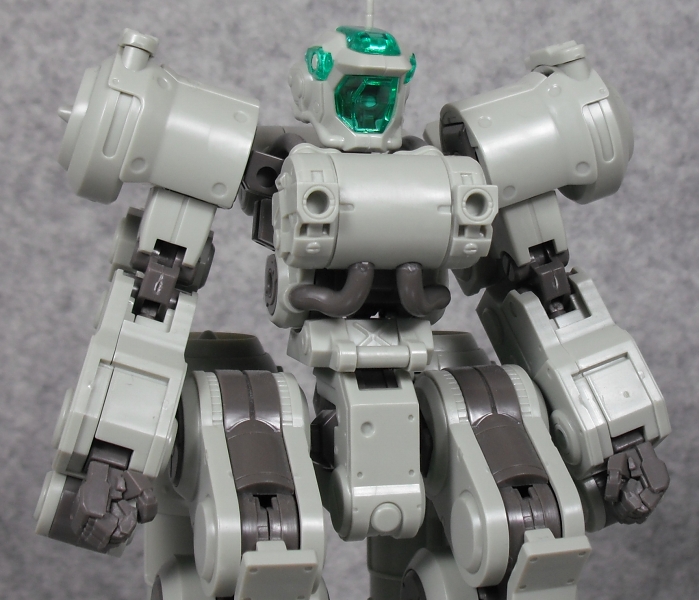
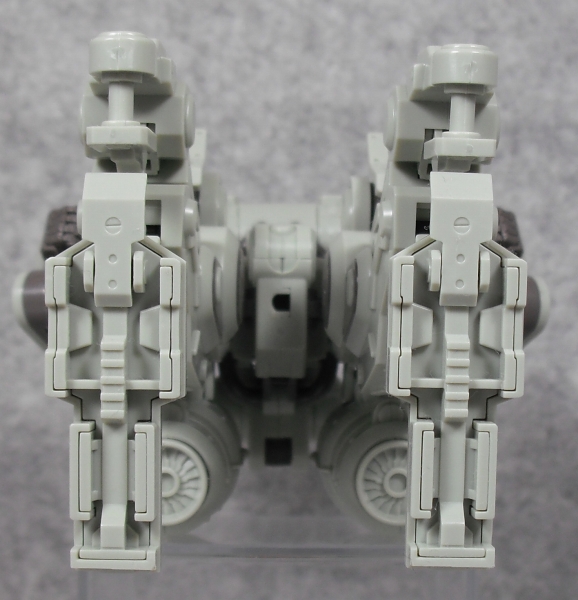
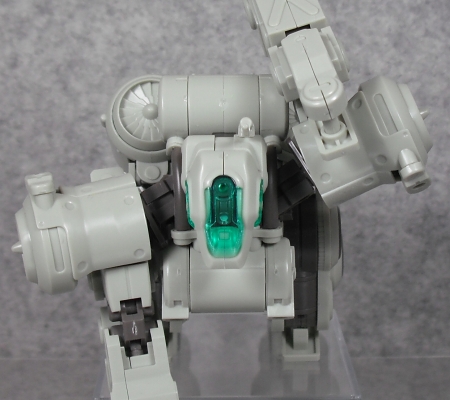
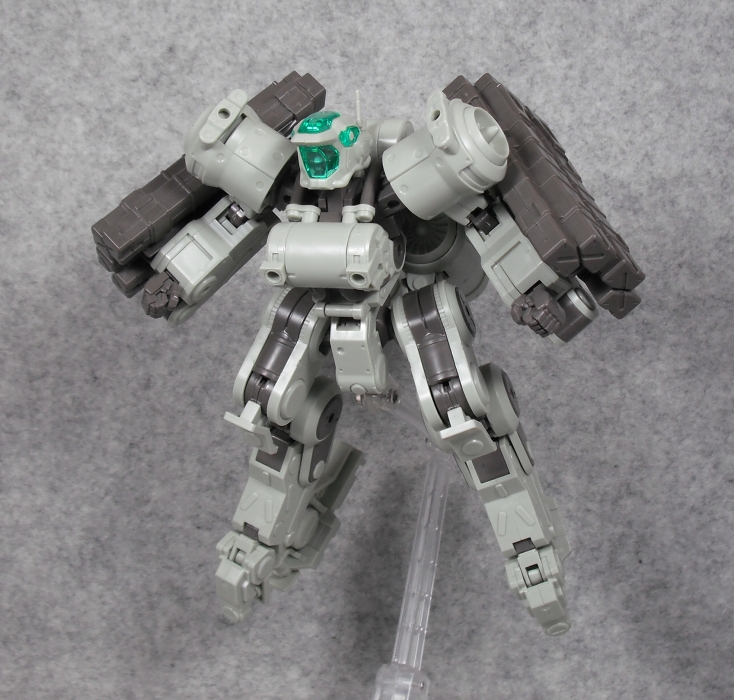
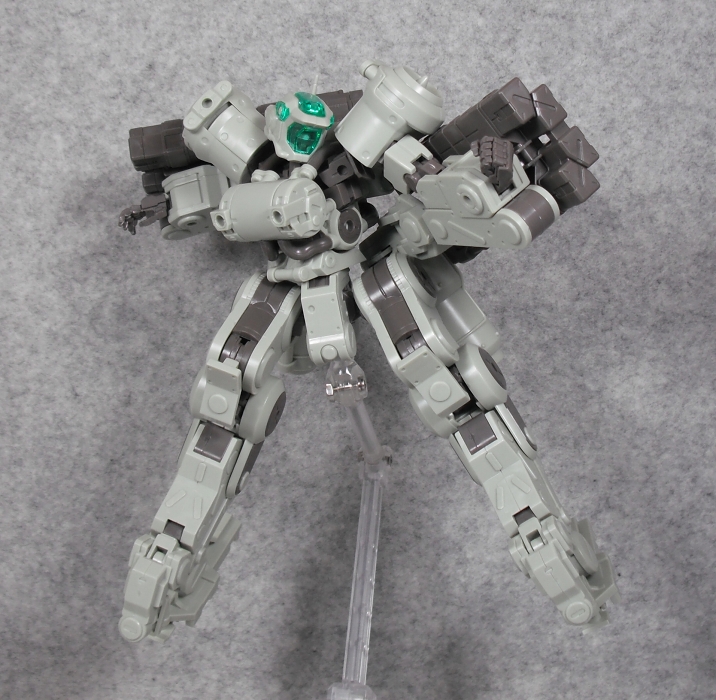
プロポーションをグルリと。
タンクのような胸と背中に重機のような足とこれまた独特なスタイル。
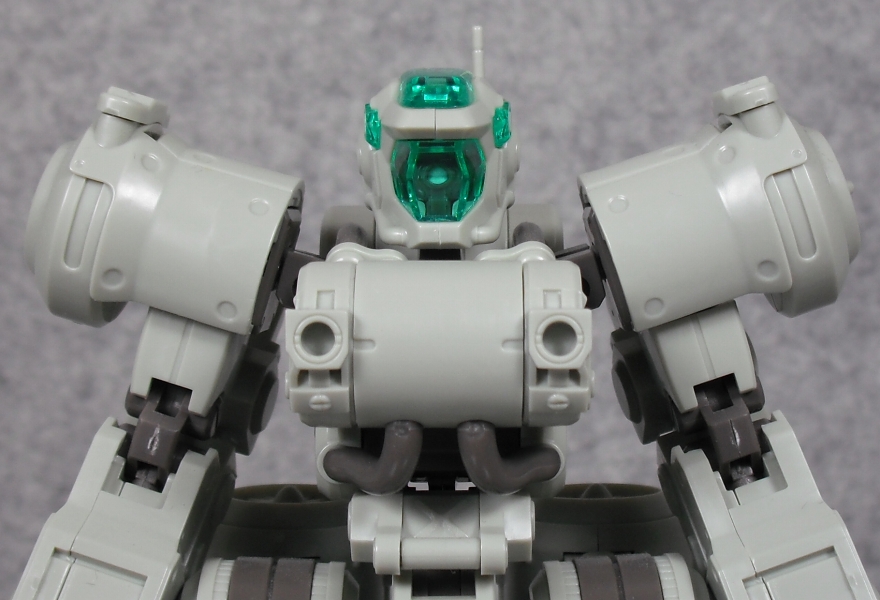



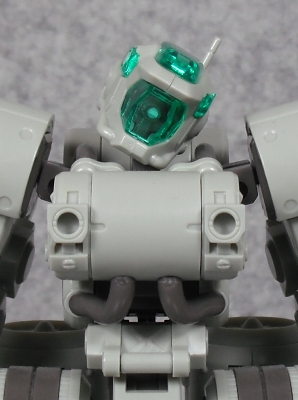
各所アップ。
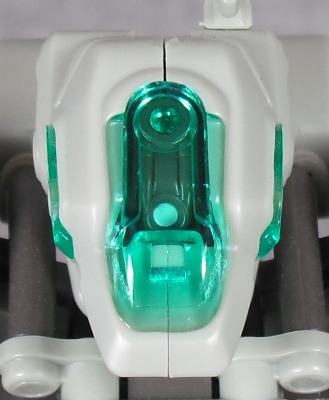
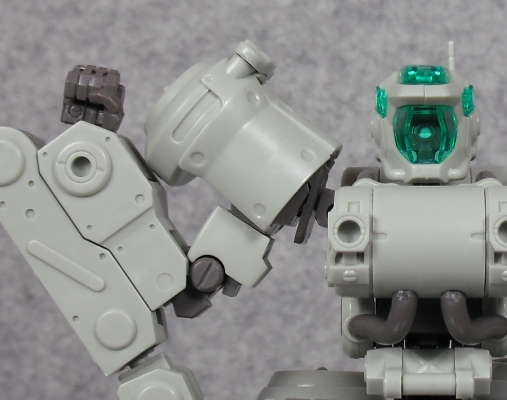
頭部にはクリアーパーツをふんだんに使用。
内部のセンサーは塗装済み。
本体の緑色ですが実際は写真よりももう少し濃い目です。
なんか大分薄く写っちゃいましたね。

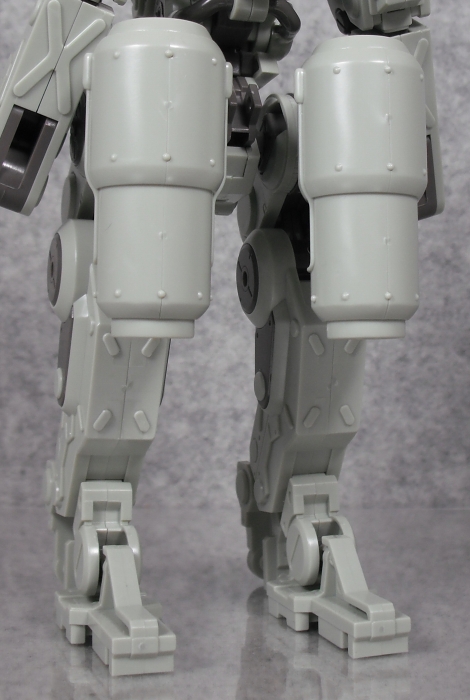
変則的な構造の足で若干小さめな感じに。
以下、可動範囲の紹介。



首の可動。
ボールジョイント接続。
頭部側に干渉がないので非常に良く動きます。
ただパイプが邪魔で横を向く場合は若干上がってしまいます。


胴の可動。
腹部が前後スイング、腰部が前後スイング+軸回転。
アーキテクトの可動が大分活きており十分動いてくれます。
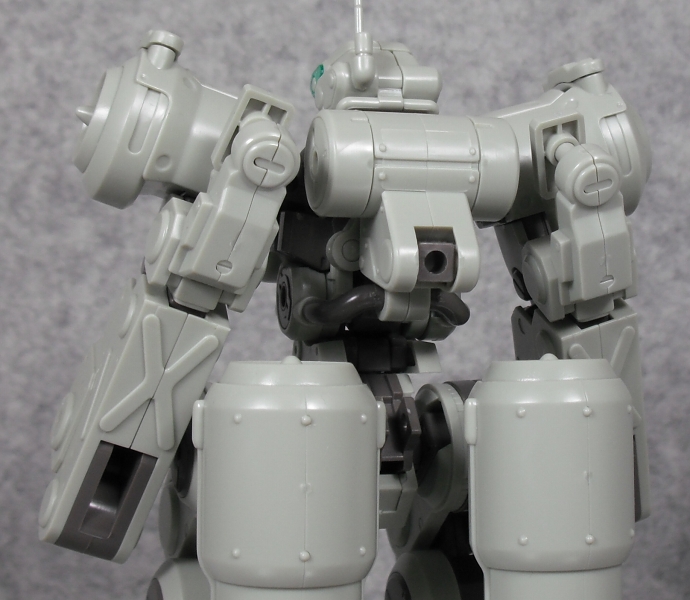
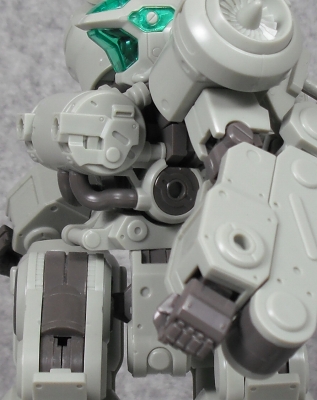
肩・腕の可動。
肩は根元ボールジョイント+軸接続、上腕上下スイング+軸回転。
肩アーマーは上腕の接続軸に通っており独立してスイング。
構造の関係で肩を上げ過ぎると上腕の接続軸が抜けやすい。
肘は二重関節。
手首は前後スイング+軸接続。
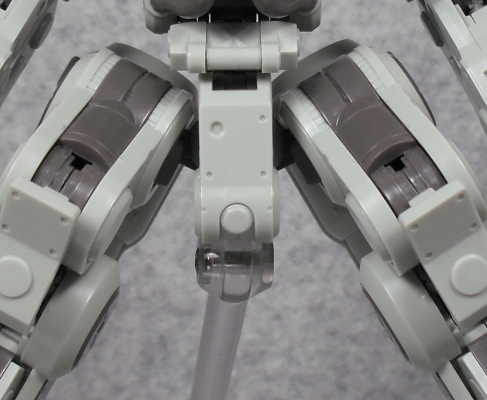
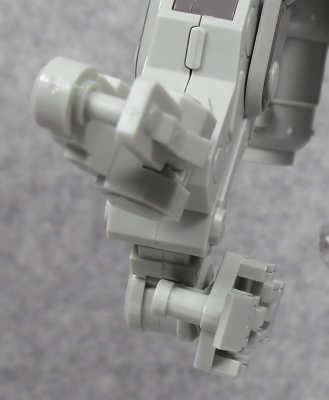
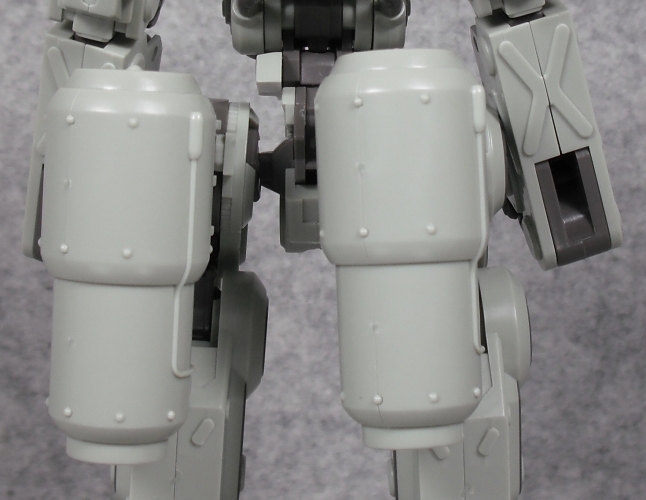
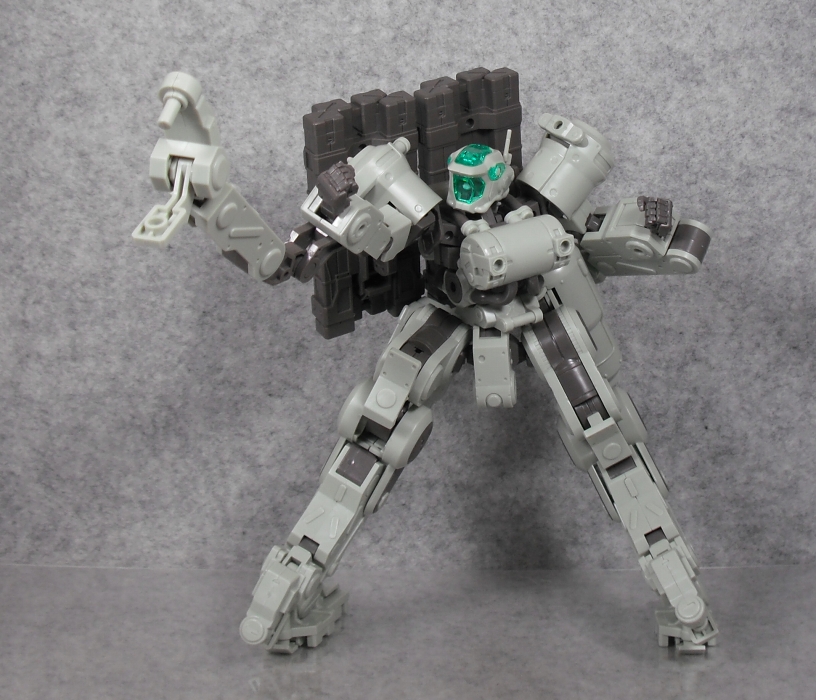
下半身の可動。
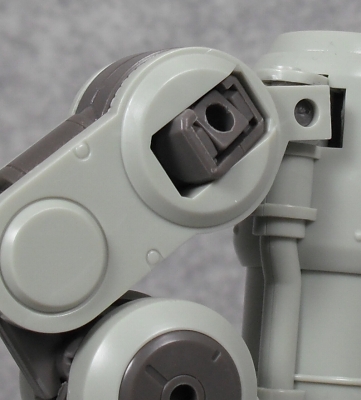
股関節はかなり独特な構造でして、X字状にスイング。
今回アーキテクト純正の股関節ですがちょっと軸細いですかね。
コボルドやシュトラウスほどではないですがちょっとヘタレやすい。
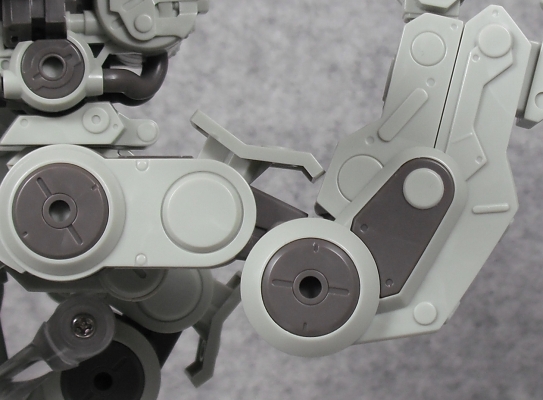
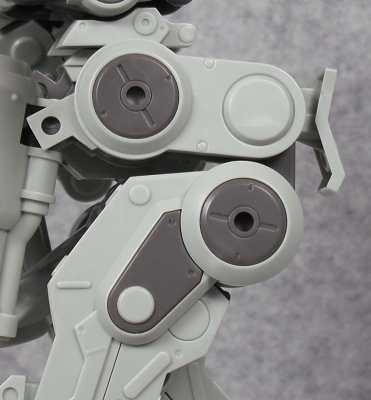
膝は二重関節。
ここもかなり独特な構造。
足首は根元が前後スイング、前後スイング+左右スイング。
可動域は非常に広いので接地性は問題ありません。
ただ前後スイングの保持力が若干微妙で普通にしている分には問題ないのですが
重心がかなり後ろ気味なポージングをすると後方への可動域の広さが仇となって倒れやすい。
まぁ多少後ろに行く分には大丈夫ですが。
総評。
上半身はゴテゴテしたデザインの割に結構動くなと。
下半身は二足歩行ロボットではかなり独特なデザインになっていて
独特な動き方で良く動きます。
ちなみに立て膝はデザイン上困難だったので今回は省きます。
以下、仕様や武装関係の紹介。
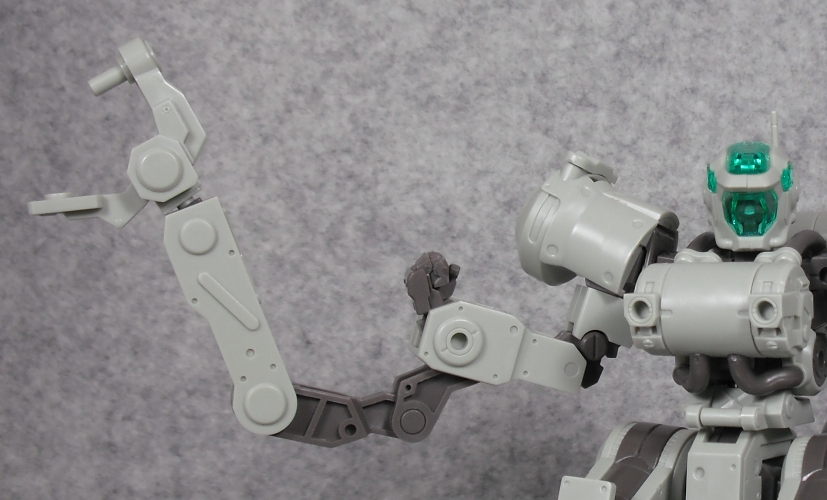
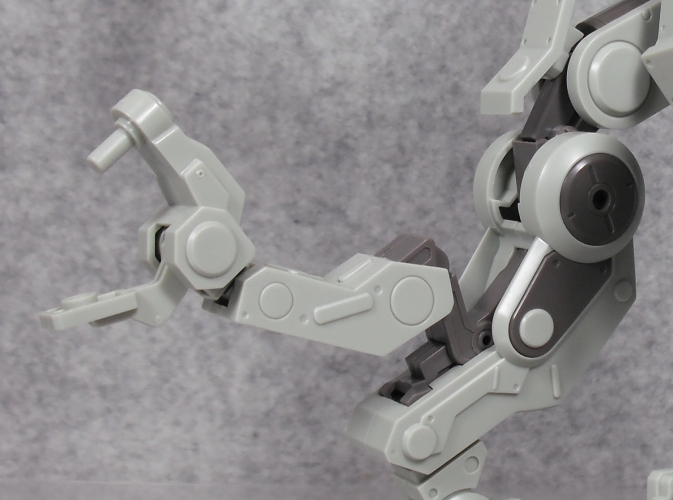
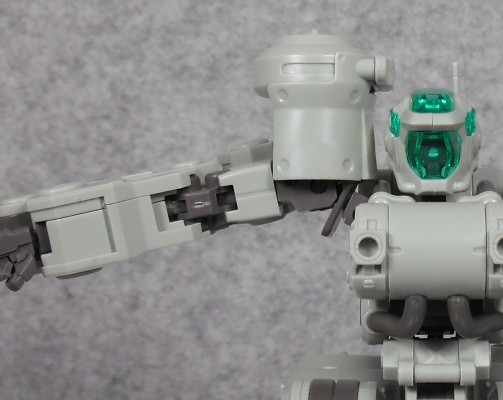
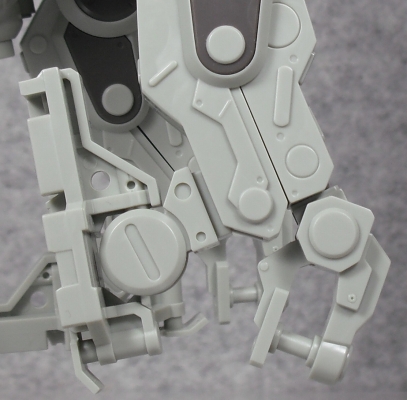
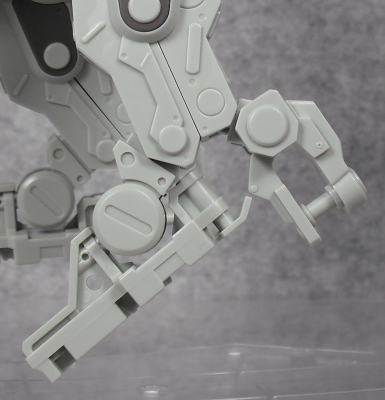
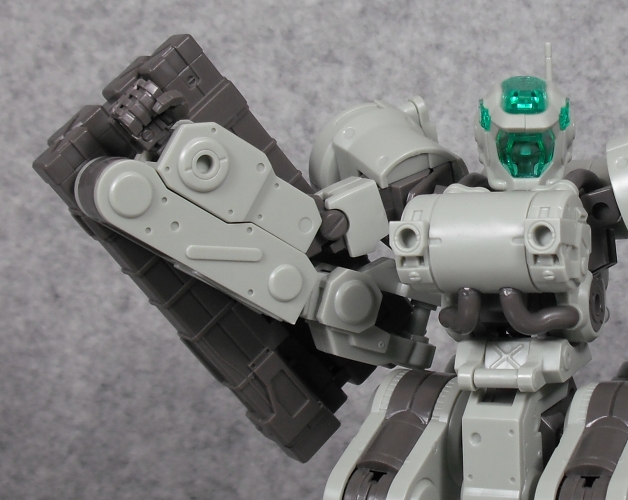
腕のサブ・アームは四軸スイングで長くうねうねと動かせます。
足のサブ・アームは三軸スイングで腕ほど長くないので少し残念。
共通して先端部は上下に開きます。
ちなみにこの先端部を普通の手に交換することも可能。
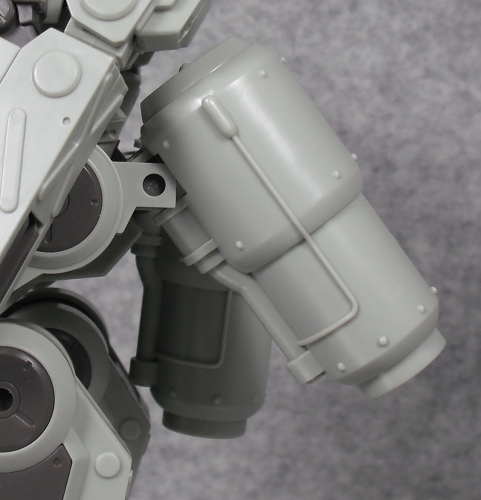
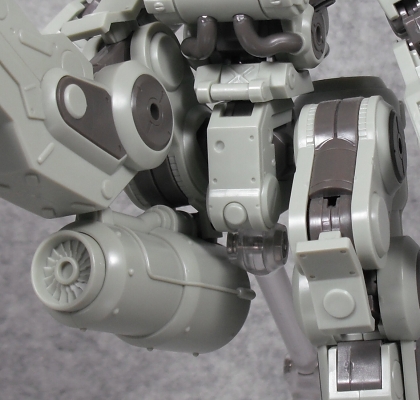
腿裏のハイドロ・ジェット・ユニットは前後と左右にスイング可能。
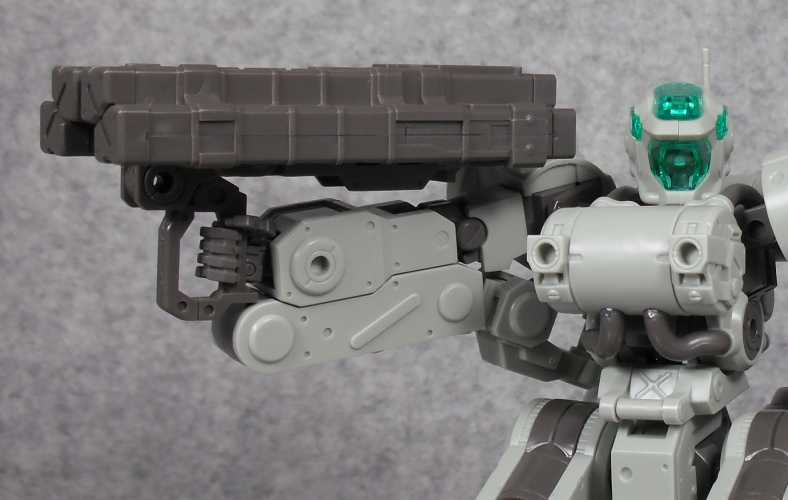
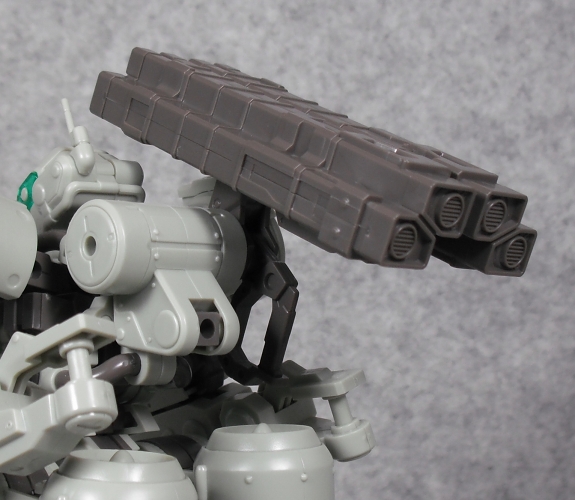
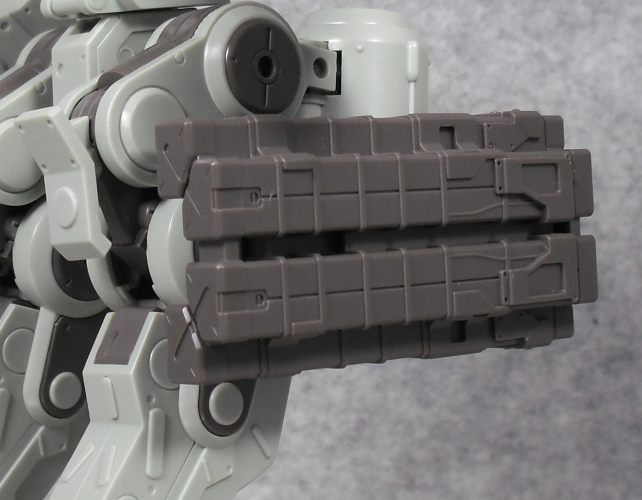
マルチパーパス・ランチャー。
M.S.Gウェポンユニット「MW-23 大型ミサイルランチャー」として発売されている物と同一。
発売順で言えばこのグライフェンに付属している物が先行ですけどね。
見た目どおりそこそこ重さがあるので持ち手の指が外れやすいです。
グリップにジョイント軸を取り付けることで背中などに取り付け可能。
撮影では忘れてたのですがグリップは内側に折り畳めます。
そのままだと動かす時に干渉したりするので。
上記とは別にグリップを丸々ジョイントに交換することで腕や足といった平面にも取り付け可能。
そういえば背中にキット単体だと全く使わないジョイント部分がありますね。
以下、適当にポージング。







買ったばかりのウェポンユニットの24と25をてんこ盛り。
フレームアームズ版のジ・Oもしくはセラヴィー(笑
持ち手が足りないのでシュトラウスから流用。
そういやハンマーって鎖抜くとモーニングスターみたいになりますね。
以上、グライフェンのレビューでした。
一言で言えば「面白い」
見た目で水中型で作業機体であることがわかるような無骨な独特なデザインといい
拡張性のある腕と足のサブアームといい。
このデザインなら可動範囲も十分に確保されており満足。
ただフレームアーキテクトという共通フレームの使用もあるのか一部関節は緩いですが。
ブログ記事元へ(別窓)
TOPページへ(別窓)